I’m an Integrated Engineering student at UBC with a passion for mechanical and electrical design. I’m driven to build cool things, solve real problems, and create a meaningful impact.
Keep scrolling to check out some of my projects and experiences.
MY PROJECTS
UBC Formula Electric
I am the drivetrain sub-team lead for UBC Formula Electric. We work to design and build the best Formula 1 style electric race car to showcase exciting sustainability at an international FSAE competition every year.
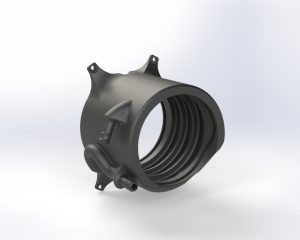
In-Hub Motor Cooling Sleeve
A project I’m currently working on is covering the development of the cooling sleeve for our in-hub motors.
This project introduced me to thermal CFD and a variety of additive manufacturing and metal casting techniques.
A project page I’m currently working on about a Python simulation I’ve developed to calculate component thermals based on lap simulations and adjustable system configurations.
A project on the design and implementation of our 4WD car’s cooling system.
Developing the cooling loop for our brand-new quad in-hub motor drivetrain system presented interesting challenges and gave me new experience in simulation, system testing, and integration.
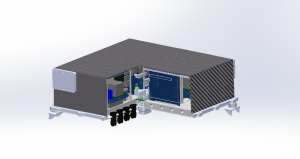
A custom power inverter enclosure for our 4WD car.
This was a packaging challenge requiring sub-millimeter precision. Through this project, I strengthened my skills in DFM, carbon fiber fabrication, and CNC machining while delivering a reliable solution under tight constraints.
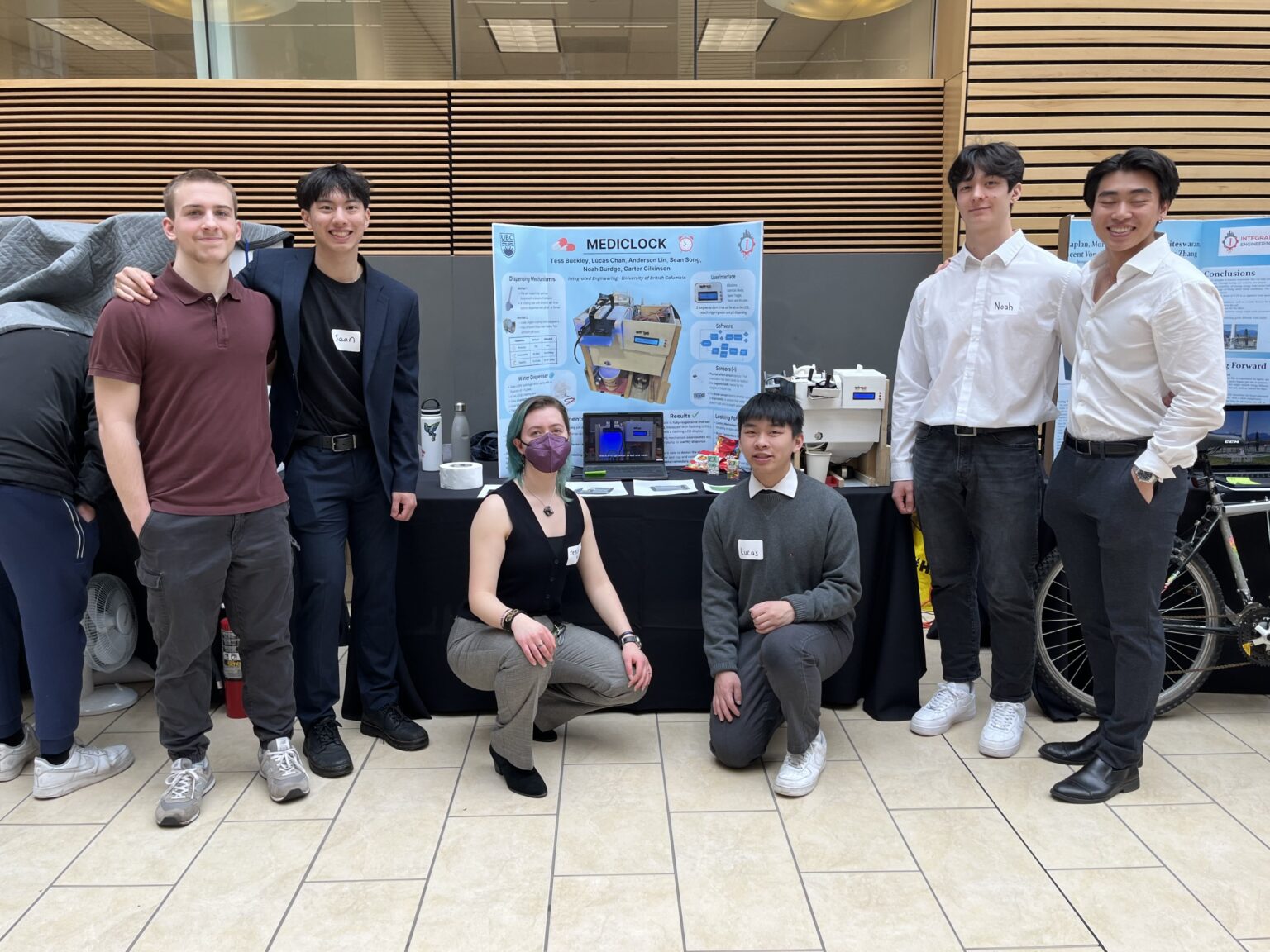
Medi-Clock was an automated alarm-based pill dispenser designed to support individuals with strict medication schedules, particularly those who may struggle to manage them independently due to physical or cognitive limitations. This was completed as my Year 2 Integrated Engineering capstone project, and our team received the highest mark in the class.
My role focused on leading the design and integration of the device’s electrical and control systems. I developed the clock and alarm functionality, programmed the user-notification system, and integrated the sensors, indicators, and actuators responsible for timed pill dispensing.
Throughout this project, I learned:
Embedded programming fundamentals
Writing modular, reliable microcontroller code to manage system timing, alarms, and overall control logic.
Sensor and actuator integration
Selecting and interfacing hall effect sensors, LEDs, motors/servos, and IR sensors to ensure precise and repeatable dispensing.
Circuit design and prototyping
Creating schematics, wiring harnesses, and breadboard layouts to support the system.
System architecture and control logic
Coordinating mechanical movement, user inputs, and alarm notifications into a unified workflow.
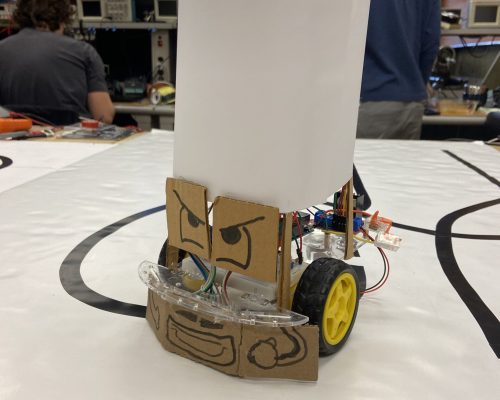
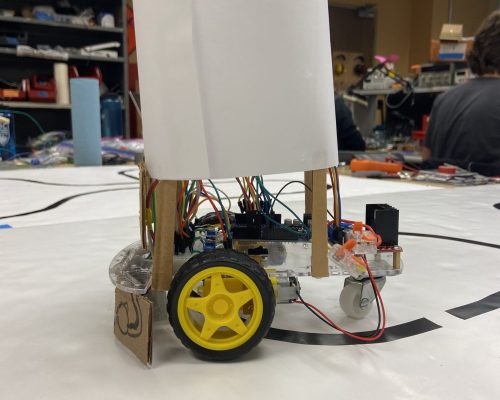
Line Following Robot
I created a small robot capable of following complex paths using infrared sensors, some code, and a couple of motors.
This robot was designed to follow a black line forward and backward using control algorithms programmed in C++ on an Arduino Uno.
Strategic placement of IR sensors and a trial and error in mechanical and software design allowed me to create a robot capable to following a path with breaks, intersections, sharp turns and other potential obstacles.
I also gave him some personality.
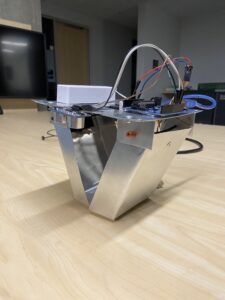
Automatic Claw
This was automatic claw made using aluminum sheet metal. I used a servo motor and sonar sensors for actuating the claw, and detecting objects. Using C++ and an Arduino board, the components could work together and pick up and drop objects when close to the ground.
Having a sonar sensor in the middle of the claw allowed us to pick up taller objects, and having one on the side allowed us to detect our height from the ground.
Contact
Please feel free to contact me through the following links!